
熱線電話
191-2198-6111

一、額定電壓(電流)驅(qū)動(dòng):為了驅(qū)動(dòng)步進(jìn)電機(jī),已證明會(huì)降低額定電壓下的電壓并降低定位精度。
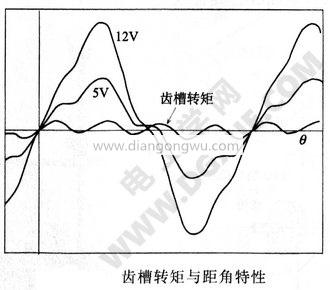
示例:如果沒(méi)有負(fù)載,則使用編碼器作為負(fù)載,并比較額定電壓(電流)低于額定電壓(電流)時(shí)的精度,精度會(huì)發(fā)生很大變化。如上圖所示,由于齒槽轉(zhuǎn)矩引起的特性失真的程度根據(jù)所施加的電壓而變化,并且電壓越低,齒槽轉(zhuǎn)矩的效果越顯著。根據(jù)作者的經(jīng)驗(yàn),較差的角度精度可能導(dǎo)致電壓(電流)的測(cè)量不準(zhǔn)確。轉(zhuǎn)矩和電壓具有一定的關(guān)系,如果該關(guān)系不同,則空載時(shí)的角度精度會(huì)變差或成為盲點(diǎn)。
二、2相激磁驅(qū)動(dòng):?jiǎn)蜗鄤?lì)磁驅(qū)動(dòng)定子齒和轉(zhuǎn)子齒進(jìn)行位置定位。對(duì)于兩相勵(lì)磁,定子的兩相繞組被勵(lì)磁,并且轉(zhuǎn)子齒磁場(chǎng)與定子磁場(chǎng)平衡以進(jìn)行位置定位。當(dāng)驅(qū)動(dòng)單相勵(lì)磁時(shí),誤差精度是每個(gè)定子相的機(jī)械精度,并且由多極位置確定兩相勵(lì)磁誤差,可以減小誤差并提高精度。特別是對(duì)于串聯(lián)2相PM型步進(jìn)電動(dòng)機(jī),1相勵(lì)磁的精度要比2相勵(lì)磁的精度低一些。
三、多步進(jìn)位置定位:帶兩步或四步定位驅(qū)動(dòng)器的兩相步進(jìn)電機(jī),帶三步或六步定位驅(qū)動(dòng)器的三相步進(jìn)電機(jī)。文章《步進(jìn)電機(jī)步距角度精度的測(cè)量》中提到的文章是兩相HB型步進(jìn)電機(jī)的一個(gè)示例,它具有顯著提高的精度,例如每四步定位一次。
例如,在每1.8°位置定位時(shí),1.8°不使用全步進(jìn),而是使用0.9°步進(jìn)電機(jī)分兩步驅(qū)動(dòng)1.8°位置定位,并選擇0.6°步進(jìn)電機(jī)進(jìn)行全步進(jìn)。步進(jìn)驅(qū)動(dòng)的驅(qū)動(dòng)模式為0.6°×3=1.8°。這可以顯著提高準(zhǔn)確性。
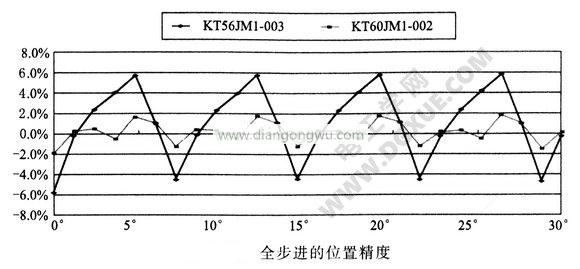
微調(diào)定子結(jié)構(gòu)的改善:眾所周知,定子的微調(diào)結(jié)構(gòu)可以提高定位精度。以兩相電動(dòng)機(jī)為例,微調(diào)結(jié)構(gòu)可以減小齒槽轉(zhuǎn)矩,并且俯仰角特性成為正弦波。下圖顯示了三相HB型1.2°步進(jìn)電機(jī),六個(gè)主極(未進(jìn)行微調(diào))和具有精細(xì)調(diào)整的十二個(gè)主極的全步進(jìn)驅(qū)動(dòng)器的位置精度比較。
下圖所示為8除法操作中定位精度的比較。
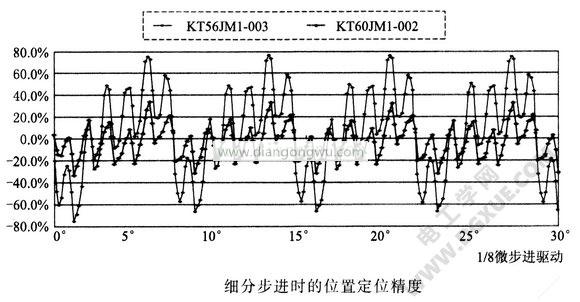
三相12主極微調(diào)結(jié)構(gòu)步進(jìn)電機(jī)完全步進(jìn)時(shí),定位精度可提高到±2%以內(nèi)。分割將結(jié)構(gòu)微調(diào)的精度提高了近50%。細(xì)分階躍角的精度大于整個(gè)階躍角的精度。將步距除以8,將步距角設(shè)為1.2°/8=0.15°作為控制計(jì)算標(biāo)準(zhǔn),精度值當(dāng)然要高于總步距角。
三相HB型高分辨率電機(jī)的改善:三相HB型步進(jìn)電機(jī)具有兩相1.8°1/3,即0.6°高分辨率電機(jī)。由于驅(qū)動(dòng)器芯片在市場(chǎng)上有售,因此可以輕松實(shí)現(xiàn)高精度的位置定位。
RM型細(xì)分時(shí)的改善:HB型步進(jìn)電機(jī)的細(xì)分角度用于定位,精度是一個(gè)問(wèn)題。放置RM 10型細(xì)分位置時(shí),計(jì)算出的位置會(huì)線性變化,并且會(huì)比較細(xì)分細(xì)分的角度精度。
公司地址 : 上海市嘉定區(qū)寶安公路2999弄
公司郵箱 : 19121986111@163.com
公司電話 :?021-6992-5088
